Das Ergebnis
Das Video zeigt den Übergang vom realen Verlauf der Straßenbahnlinien zu dem Liniennetzplan der BSAG.
Motivation
Auf Reddit gibt es eine Sammlung von Animationen, die den Unterschied zwischen schematischen ÖPNV-Karten und der realen Geographie zeigen:
Ich möchte so eine Animation für das Straßenbahnnetz der BSAG in Bremen erstellen.
Dafür brauche ich die Pfade der Linien
- aus dem Liniennetzplan
- aus den Kartendaten von OpenStreetMaps (OSM)
Diese Pfade muss ich dann in ein gemeinsames Koordinatensystem überführen und dann den Übergang animieren.
Koordinaten der Linienführung
aus dem Liniennetzplan
Um den genauen Linienverlauf auf dem Netzplan nachbilden zu können, exportiere ich den Linienverlauf aus der PDF.
Vorbereitung
- Inkscape installieren
- Das Plugin ExportXY installieren
- Dazu die
*.pyund die*.inxDateien in den Inkscape-Extension-Ordner kopieren - Unter Windows ist der Pfad für den Extension-Ordner
%AppData%\inkscape
- Dazu die
- Den Netzplan in Inkscape öffnen
Export der Koordinaten
Für jede Linie:
- Eine neue Textdatei erstellen
- Eine Straßenbahnlinie auswählen
Jetzt sollte die bounding box des Pfades ausgewählt sein. In der Werkzeugleiste werden dann die X und Y Koordinaten, Breite und Höhe der bounding box angezeigt. Beispiel:

- Diese Werte als erste Zeile in die Textdatei eintragen, die Werte getrennt mit Tab
- Jetzt das Pfad-Werkzeug auswählen
- Dem Pfad Knoten hinzufügen mit
Erweiterungen > Pfad modifizieren > Knoten hinzufügen
- Die Koordinaten exportieren mit
Erweiterungen > Exportieren > ExportXY - Die angezeigten Koordinaten kopieren und in die Textdatei einfügen
Die Datei von Linie 1 fängt dann z. B. so an:
574.500 1213.225 2108.693 688.133
0.0 0.0
0.710136 0.70221
1.41883 1.40711
2.1275 2.11266
...
Pfade aus OpenStreetMaps (OSM)
Die Linienführung aus den realen Karten kann aus OSM exportiert werden. Dazu benutze ich die Overpass API. Auf der Seite
- Den gewünschten Kartenausschnitt wählen
- Oben auf
Wizardklicken - Als Suchbegriff
route=trameingeben und ausführen mitbuild and run query - Jetzt sollte die Linienführung auf der Karte sichtbar sein
- Exportieren als GeoJSON
Daten zusammenführen
Um die Linien aus dem Netzplan und OSM zusammen darzustellen müssen sie in ein gemeinsames Koordinatensystem überführt werden. Die Koordinaten aus dem Liniennetzplan sind in relativen Bildkoordinaten. Um aus ihnen die absoluten Koordinaten zu berechnen habe ich die Maße der bounding box gespeichert. In der GeoJSON aus OSM sind die Linien als GPS-Koordinaten gespeichert.
Dafür benötige ich folgende Python Pakete
import pandas as pd
import geopandas as gpd
import numpy as np
from scipy import optimize as so
Straßenbahnlinien
Als erstes habe ich die Namen der Linien aus dem GeoJSON und die Farben aus dem Liniennetzplan herausgesucht
line = {
1: {'name': 'Tram 1: Roland-Center => Bf Mahndorf',
'color': '#00a650ff'},
2: {'name': 'Tram 2: Sebaldsbrück => Gröpelingen',
'color': '#1c63b7ff'},
3: {'name': 'Tram 3: Gröpelingen => Weserwehr',
'color': '#00adefff'},
4: {'name': 'Tram 4: Lilienthal => Arsten',
'color': '#ed1c24ff'},
5: {'name': 'Tram 5: Bürgerpark => Bürgerpark',
'color': '#0aabbaff'},
6: {'name': 'Tram 6: Universität-Nord => Flughafen-Süd',
'color': '#fbc707ff'},
8: {'name': 'Tram 8: Kulenkampffallee => Roland-Center',
'color': '#80cc28ff'},
10: {'name': 'Tram 10: Sebaldsbrück => Gröpelingen',
'color': '#2e3192ff'}
}
GPS Koordinaten laden
Die heruntergeladene GeoJSON habe ich in das Script-Verzeichnis als export.geojson gespeichert. Die Datei lade ich mit
routes = gpd.read_file('export.geojson')
for i in line.keys():
route = routes[routes.name.str.match(line[i]['name'], na=False)]
line[i]['gps'] = route.geometry.iloc[0].geoms[0]
und suche nach den minimalen und maximalen Koordinaten in allen Richtungen
gps_bounds = np.array([ r['gps'].bounds for r in line.values() ])
gps_xmin = np.min(gps_bounds[:, (0, 2)])
gps_xmax = np.max(gps_bounds[:, (0, 2)])
gps_ymin = np.min(gps_bounds[:, (1, 3)])
gps_ymax = np.max(gps_bounds[:, (1, 3)])
Linien aus Netzplan laden
Die aus Inkscape exportierten Koordinaten habe ich in einem Unterordner lines und benannt nach der Liniennummer, z. B. 1.txt, gespeichert.
Die Dateien lade ich und transformiere die Koordinaten von relativen zu absoluten Bildkoordinaten. Dazu passe ich erst die Skalierung an die bounding box an und verschiebe sie dann an die richtige Position
for i in line.keys():
path_bb = pd.read_csv(f'linien/{i}.txt', names=['x', 'y', 'w', 'h'],
index_col=False, sep='\t', nrows=1)
path_rel = pd.read_csv(f'linien/{i}.txt', names=['x', 'y'],
index_col=False, sep='\t', skiprows=1)
# Convert relative to absolute coordinates
# Fix scaling of path
_xmin = path_rel['x'].min()
_xmax = path_rel['x'].max()
path_abs_x = path_rel['x'].to_numpy() * path_bb['w'].iloc[0] / (_xmax - _xmin)
_ymin = path_rel['y'].min()
_ymax = path_rel['y'].max()
path_abs_y = -path_rel['y'].to_numpy() * path_bb['h'].iloc[0] / (_ymax - _ymin)
# Add offset from bounding box
path_abs_x += path_bb['x'].iloc[0] - np.min(path_abs_x)
path_abs_y += path_bb['y'].iloc[0] - np.min(path_abs_y)
line[i]['path'] = np.stack((path_abs_x, path_abs_y)).T
Da die y-Achse in Bildkoordinaten in die falsche Richtung zeigt muss ich sie noch spiegeln.
path_ymax = np.min([ r['path']['y'].min() for r in line.values() ] )
for i in line.keys():
line[i]['path']['y'] = path_ymax - line[i]['path']['y']
Wie bei den GPS-Koordinaten suche ich nach den minimalen und maximalen Koordinaten in allen Richtungen
path_bounds = []
for i in line.keys():
_x = line[i]['path']['x']
_y = line[i]['path']['y']
path_bounds.append((_y.min(), _x.min(), _y.max(), _x.max()))
path_bounds = np.array(path_bounds)
path_xmin = np.min(path_bounds[:, (1, 3)])
path_xmax = np.max(path_bounds[:, (1, 3)])
path_ymin = np.min(path_bounds[:, (0, 2)])
path_ymax = np.max(path_bounds[:, (0, 2)])
Korrektur von Linie 5
Der Pfad von Linie 5 aus dem Netzplan ist nicht vollständig, da er eine Schleife enthält. Ich suche nahc dem Punkt, an dem sich die Schleife schließt und füge eine Kopie des restlichen Pfads an.
loop_idx = np.argmin(np.hypot(line[5]['path'][1:, 0] - line[5]['path'][0, 0],
line[5]['path'][1:, 1] - line[5]['path'][0, 1]))
line[5]['path'] = np.concatenate((line[5]['path'][:loop_idx:-1, :], line[5]['path']))[::-1]
Interpolation der GPS-Koordinaten
Um einfacher mit den GPS-Koordinaten arbeiten zu können, passe ich ihre Anzahl an die Anzahl der Bildkoordinaten an. Ich interpoliere die GPS-Koordinaten so, dass die neuen Koordinaten äquidistant sind.
for i in line.keys():
steps = np.linspace(0, 1, line[i]['path'].shape[0])
gps_interp = [ line[i]['gps'].interpolate(s, normalized=True).coords[:][0] for s in steps ]
line[i]['gps_interp'] = np.array( gps_interp )
Koordinaten aus dem Netzplan transformieren
Um die Daten zusammen darzustellen transformiere ich die Bildkoordinaten aus dem Netzplan in den Wertebereich dere GPS-Koordinaten. Dafür gibt es zwei Möglichkeiten.
Übereinstimmende Kanten
Um die Koordinaten zu transfomieren kann ich annehmen, dass die nördlichsten, östlichsten, südlichsten und westlichsten Koordinaten übereinstimmen.
path_scale_x = (gps_xmax - gps_xmin)/(path_xmax - path_xmin)
path_scale_y = (gps_ymax - gps_ymin)/(path_ymax - path_ymin)
for i in line.keys():
path_gps_x = (line[i]['path'][:, 0] - path_xmin) * path_scale_x + gps_xmin
path_gps_y = (line[i]['path'][:, 1] - path_ymin) * path_scale_y + gps_ymin
line[i]['path_gps'] = np.stack((path_gps_x, path_gps_y)).T
In einer Animation würden sich in dem Fall die Punkte an den Kanten recht wenig bewegen. Ein Großteil der bewegungen würde in der Mitte des Bildes stattfinden.
Geringste Distanz
Alternativ kann ich eine Metrik einführen, wie gut die beiden Koordinaten nach der Transformation übereinander liegen. Dann kann ich mit der Funktion interpolate() aus dem Paket scipy.optimize kann die optimalen Parameter finden, die diese Metrik minimieren.
Die Metrik berechne ich als Summe der Distanzen zwischen den Punkten der jeweiligen Koordinatensystemen.
def dist(a, line):
dist = 0
for i in line.keys():
path_gps_x = line[i]['path'][:, 0] * a[0] + a[1]
path_gps_y = line[i]['path'][:, 1] * a[2] + a[3]
gps_x = line[i]['gps_interp'][:, 0]
gps_y = line[i]['gps_interp'][:, 1]
point_dists = np.hypot(gps_x - path_gps_x, gps_y - path_gps_y)
dist += np.sum(point_dists)
return dist
Diese Metrik minimiere ich
opt = so.minimize(dist, (1, 0, 1, 0), args=(line))
und transformiere dann die Koordinaten mit den ermittelten Parametern
for i in line.keys():
path_gps_x = line[i]['path'][:, 0] * opt.x[0] + opt.x[1]
path_gps_y = line[i]['path'][:, 1] * opt.x[2] + opt.x[3]
line[i]['path_gps'] = np.stack((path_gps_x, path_gps_y)).T
Richtung der Linien
Als letztes muss ich noch sicherstellen, dass die Daten alle den richtigen Start- und Endpunkt haben.
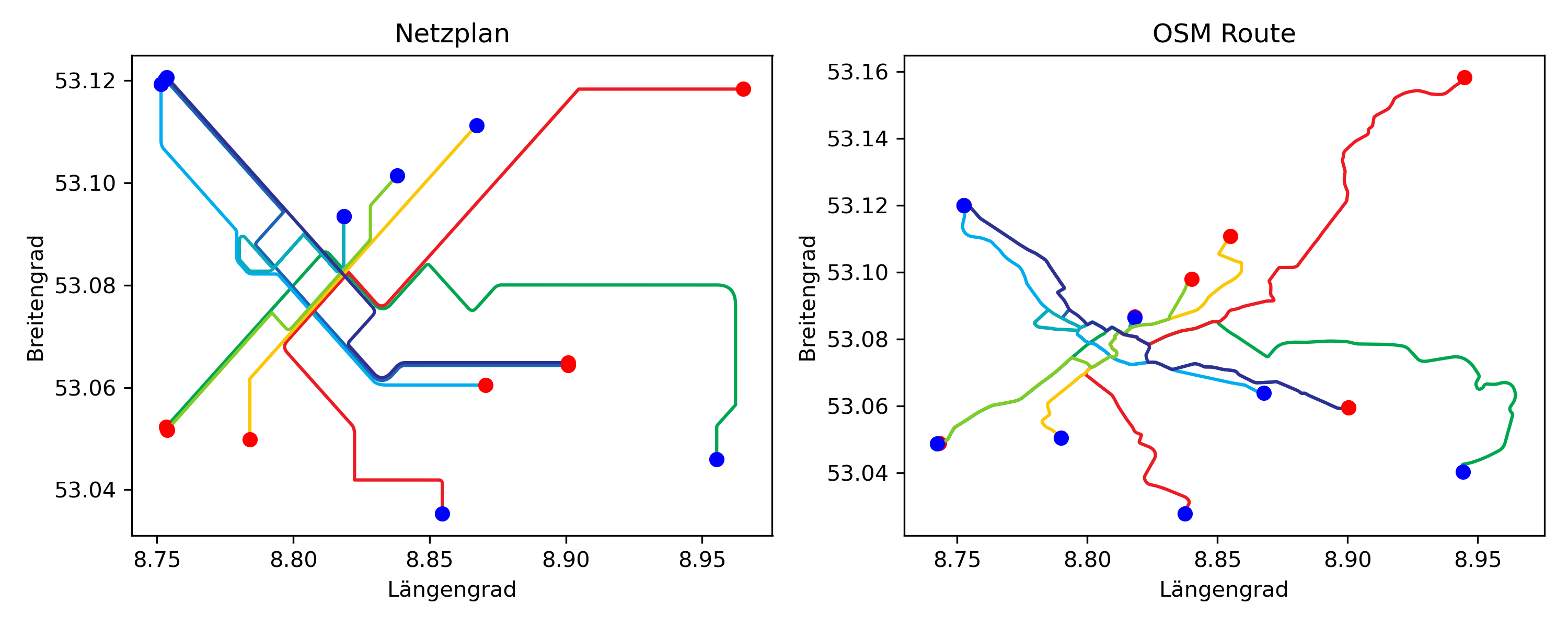 Auf dem Bild ist die Linienführung im Netzplan und OSM dargestellt, jeweils mit den Startpunkten in rot und den Endpunkten in blau. Wie man sieht, stimmen diese bei einigen Linien nicht überein.
Ich drehe die Reihenfolge der Koordinaten um, wenn Start- und Endpunkt näher aneinander sind als die jeweiligen Startpunkte.
Auf dem Bild ist die Linienführung im Netzplan und OSM dargestellt, jeweils mit den Startpunkten in rot und den Endpunkten in blau. Wie man sieht, stimmen diese bei einigen Linien nicht überein.
Ich drehe die Reihenfolge der Koordinaten um, wenn Start- und Endpunkt näher aneinander sind als die jeweiligen Startpunkte.
for i in lines.keys():
dist_first = np.hypot(lines[i]['gps_interp'][0, 0] - lines[i]['path_gps'][0, 0],
lines[i]['gps_interp'][0, 1] - lines[i]['gps_interp'][0, 1])
dist_last = np.hypot(lines[i]['gps_interp'][-1, 0] - lines[i]['path_gps'][0, 0],
lines[i]['gps_interp'][-1, 1] - lines[i]['gps_interp'][0, 1])
if dist_last < dist_first:
lines[i]['path_gps'][:, :] = lines[i]['path_gps'][::-1, :]
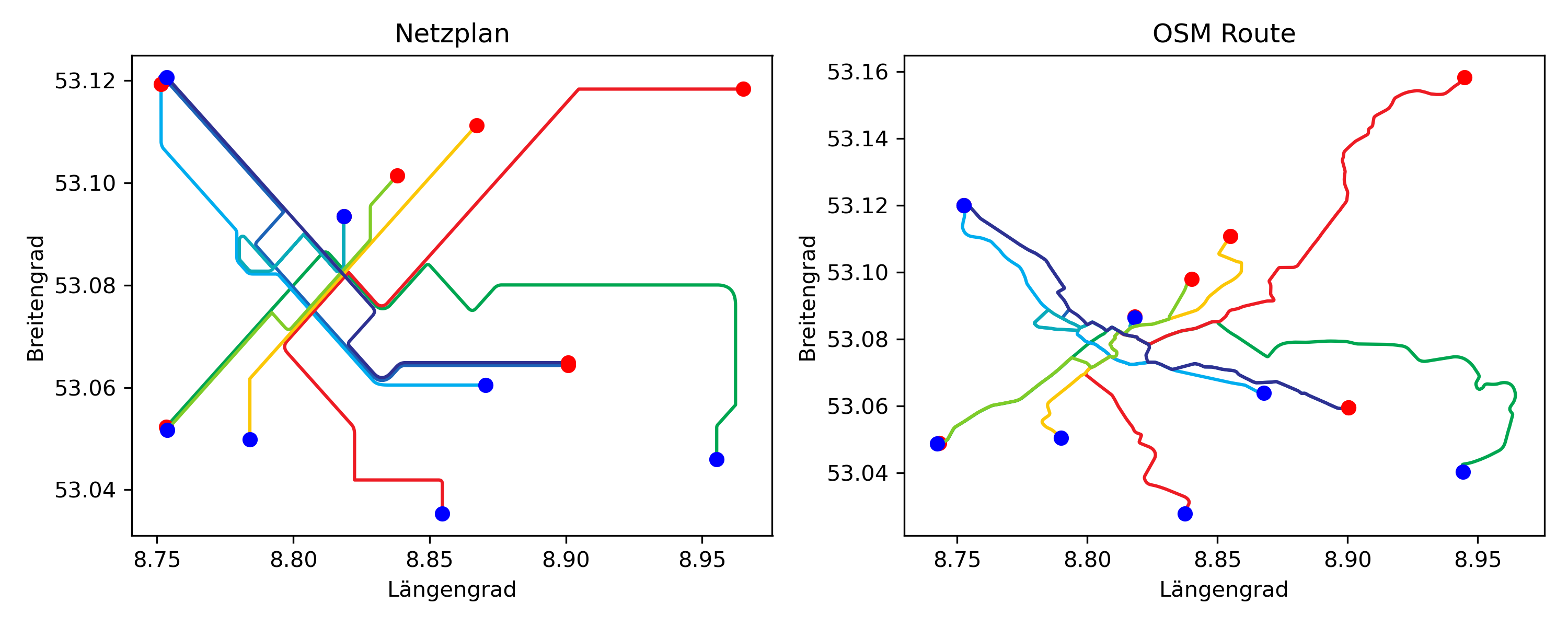 Nach der Korrektur sind die Start- und Endpunkte in der richtigen Reihenfolge. In der Animation erstelle ich jetzt einen Übergang vom rechten in des linke Bild.
Nach der Korrektur sind die Start- und Endpunkte in der richtigen Reihenfolge. In der Animation erstelle ich jetzt einen Übergang vom rechten in des linke Bild.
Animation
Interpolation des Übergangs
Ich habe jetzt für jede Linie zwei Arrays: Koordinaten im Netzplan und in OSM. Beide Arrays haben jeweils die gleiche Anzahl an äquidistanten Punkten. Ich kann jetzt durch lineare Interpolation für jeden Punkt im Übergang Punkt in OSM -> Punkt in Netzplan die Positionen berechnen.
frames = 150
delay = 50
for i in line.keys():
anim_path_x = np.linspace(line[i]['gps_interp'][:, 0], line[i]['path_gps'][:, 0], frames)
anim_path_y = np.linspace(line[i]['gps_interp'][:, 1], line[i]['path_gps'][:, 1], frames)
path_anim = np.stack((anim_path_x, anim_path_y)).T
start_delay = np.repeat(line[i]['gps_interp'][:, None, :], delay, axis=1)
end_delay = np.repeat(line[i]['path_gps'][:, None, :], delay, axis=1)
line[i]['path_anim'] = np.concatenate((start_delay, path_anim, end_delay), axis=1)
Hier sind frames die Anzahl der Bilder im Übergang und delay die Anzahl Bilder, in denen am Anfang und am Ende ein Standbild stehen bleibt.
Plot
Die Animation erstelle ich dann mit Matplotlib. Für jeden Frame tausche ich die Daten der Linien im Plot.
from matplotlib import pyplot as plt
from matplotlib.animation import FuncAnimation
fig, ax = plt.subplots(figsize=(8, 8))
line_p = []
for i in line.keys():
line_p.append(ax.plot(line[i]['path_anim'][:, 0, 0], line[i]['path_anim'][:, 0, 1],
color=line[i]['color'])[0])
ax.axis('off')
def animate(frame):
global line, delay
for i, ln in enumerate(line_p):
ln.set_data(list(line.values())[i]['path_anim'][:, frame, 0],
list(line.values())[i]['path_anim'][:, frame, 1])
return line_p
plt.tight_layout()
anim = FuncAnimation(fig, animate, frames=frames+2*delay, interval=20, blit=False)
plt.show()
Das gesamte Skript und die Dateien sind in diesem Repository zu finden.